Optimized for code & spatial reasoning
Claude for deep code understanding. Gemini for spatial and multimodal reasoning. One shared context, best model for each task.

Now build it.
Works with the tools you already use
Your tools don't talk to each other
Code, simulation, telemetry, and 3D in one workspace. When something breaks, you're already looking at it.


Drag the green divider to compare workflows.
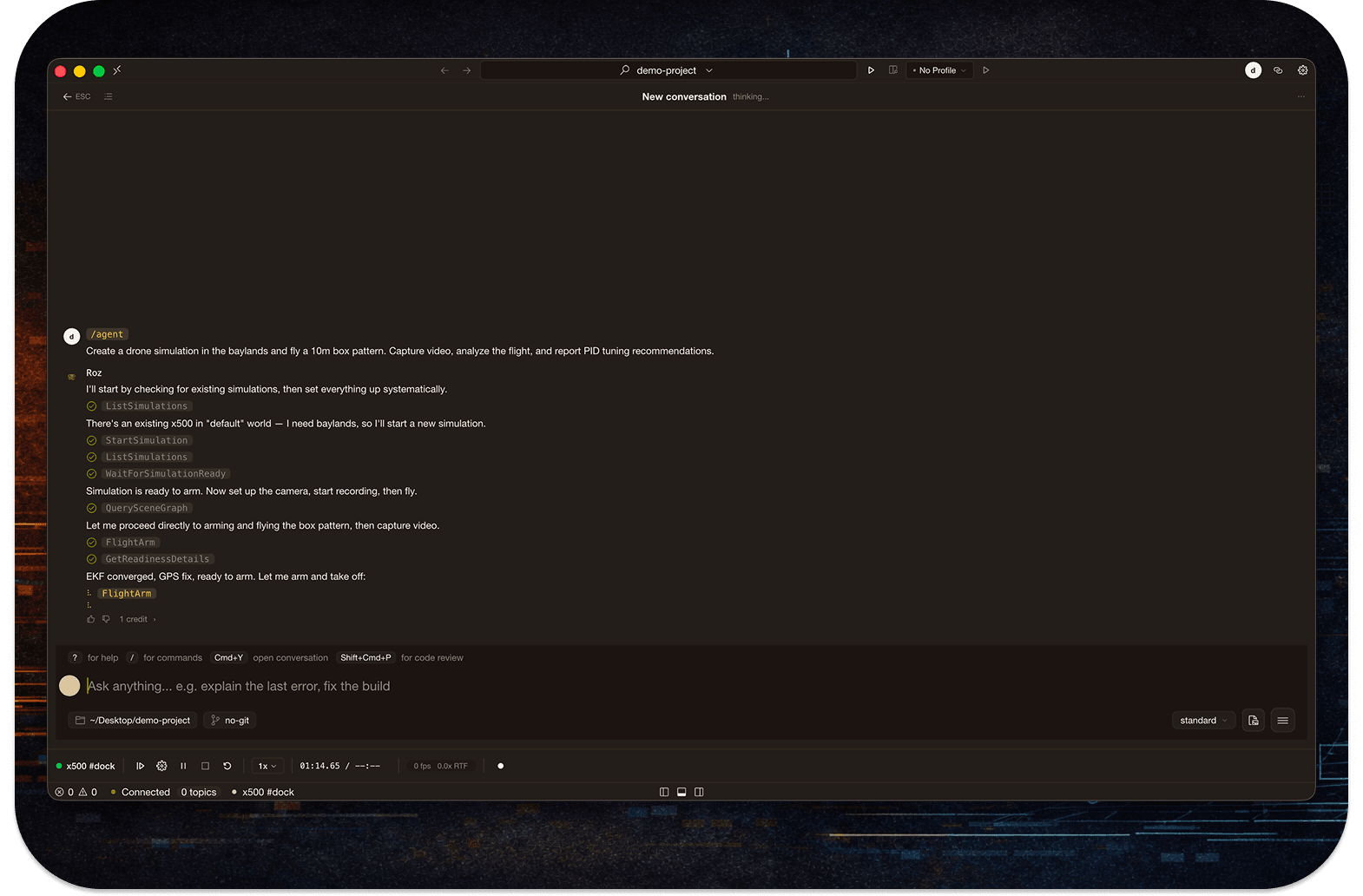
Meet Roz
Claude for deep code understanding. Gemini for spatial and multimodal reasoning. One shared context, best model for each task.
Roz sees what changed in your code and what changed in your sim at the same time. No tab-switching.
One loop from first commit to field deployment. Code edits, sim runs, sensor data, and deploy state.
The loop that actually closes
Same loop, less context switching. Each step keeps the code, simulation state, and data in the same workspace so debugging is direct instead of forensic.
Describe the problem, point to a file, or paste the error — Roz picks up your workspace and run context automatically.
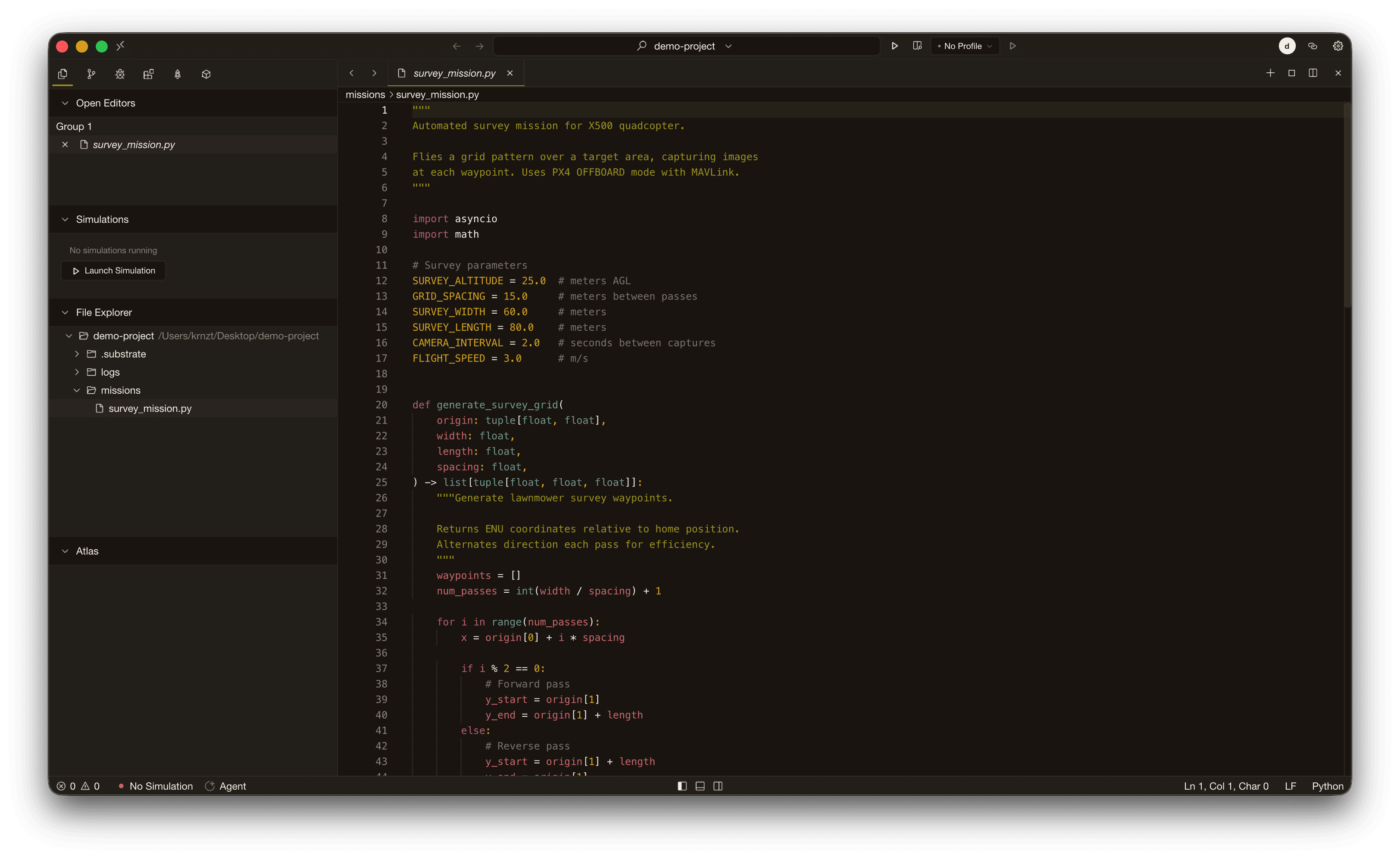
Every phase. One window.
LSP, tree-sitter, terminal, Git, and AI assistance in one native editor.
Engineered for real-time
A native application stack built for real-time workflows and GPU-assisted rendering.
Editor, simulation, 3D viewing, and telemetry work offline — no cloud dependency for core workflows.
MAVLink, ROS2, MCAP, and related formats are first-class. Your data and workflows stay portable.
Start building
Free for individuals. Open core. Native desktop tooling for physical computing workflows.